
Archives
Master’s Thesis: Decentralized Multiagent Trajectory Planning in Real-World Environments
In the rapidly evolving domain of unmanned aerial vehicle (UAV) applications, multiagent trajectory planning plays an indispensable role. The applications encompass search and rescue missions, surveillance, package delivery, and more. Each of these scenarios necessitates intricate coordination amongst multiple UAVs, driving the need for sophisticated multiagent trajectory planning. Although many centralized trajectory planners exist, they…
PRIMER: Perception-Aware Robust Learning-based Multiagent Trajectory Planner
In decentralized multiagent trajectory planners, agents need to communicate and exchange their positions to generate collision-free trajectories. However, due to localization errors/uncertainties, trajectory deconfliction can fail even if trajectories are perfectly shared between agents. To address this issue, we first present PARM and PARM*, perception-aware, decentralized, asynchronous multiagent trajectory planners that enable a team of…
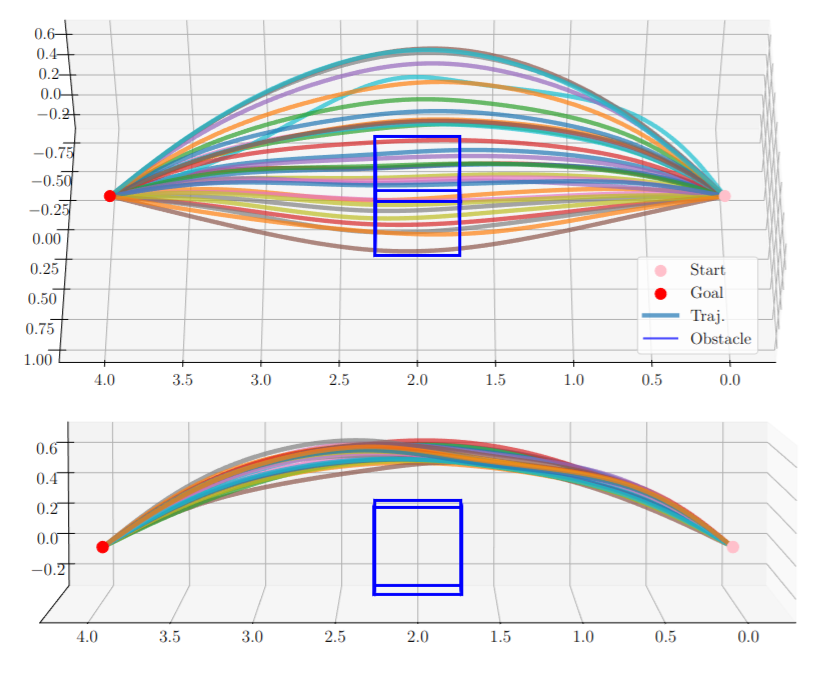
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory Planning
Traditional optimization-based planners, while effective, suffer from high computational costs, resulting in slow trajectory generation. A successful strategy to reduce computation time involves using Imitation Learning (IL) to develop fast neural network (NN) policies from those planners, which are treated as expert demonstrators. Although the resulting NN policies are effective at quickly generating trajectories similar…
PUMA: Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment
Fully decentralized, multiagent trajectory planners enable complex tasks like search and rescue or package delivery by ensuring safe navigation in unknown environments. However, deconflicting trajectories with other agents and ensuring collision-free paths in a fully decentralized setting is complicated by dynamic elements and localization uncertainty. To this end, this paper presents (1) an uncertainty-aware multiagent…
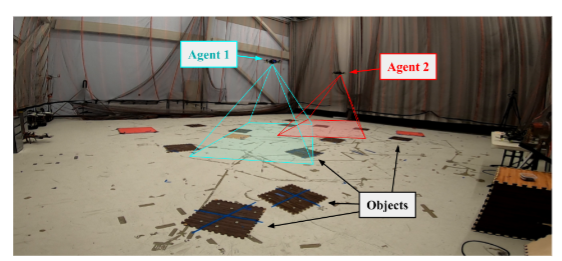
SOS-Match: Segmentation for Open-Set Robust Correspondence Search and Robot Localization in Unstructured Environments
We present SOS-Match, a novel framework for detecting and matching objects in unstructured environments. Our system consists of 1) a front-end mapping pipeline using a zero-shot segmentation model to extract object masks from images and track them across frames and 2) a frame alignment pipeline that uses the geometric consistency of object relationships to efficiently…
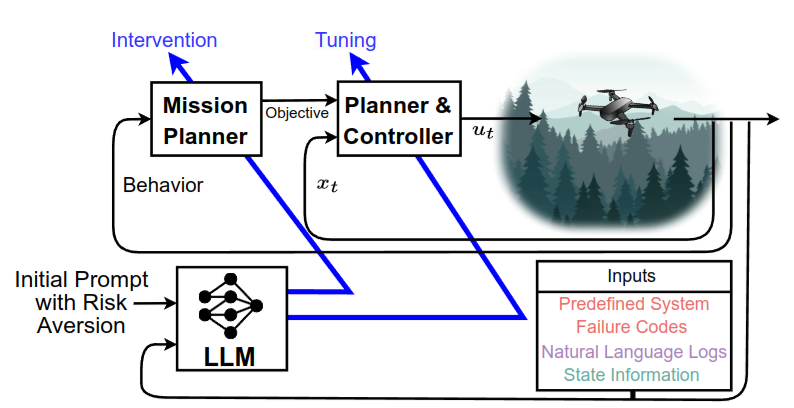
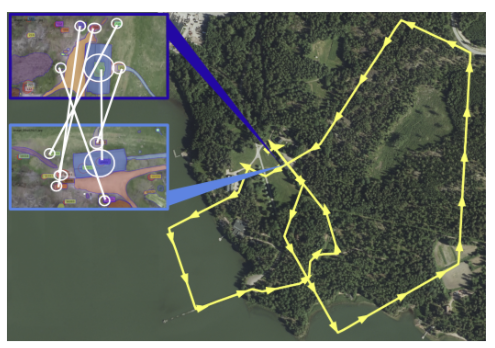
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial Robots
Large Language Models (LLMs) pre-trained on internet-scale datasets have shown impressive capabilities in code understanding, synthesis, and general purpose question-and-answering. Key to their performance is the substantial prior knowledge acquired during training and their ability to reason over extended sequences of symbols, often presented in natural language. In this work, we aim to harness the…

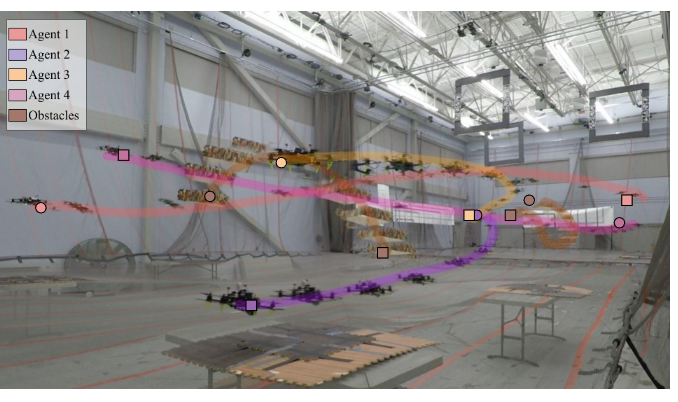
Robust mader: Decentralized multiagent trajectory planner robust to communication delay in dynamic environments
Communication delays can be catastrophic for multiagent systems. However, most existing state-of-the-art multiagent trajectory planners assume perfect communication and therefore lack a strategy to rectify this issue in real-world environments. To address this challenge, we propose Robust MADER (RMADER), a decentralized, asynchronous multiagent trajectory planner robust to communication delay. RMADER ensures safety by introducing (1)…
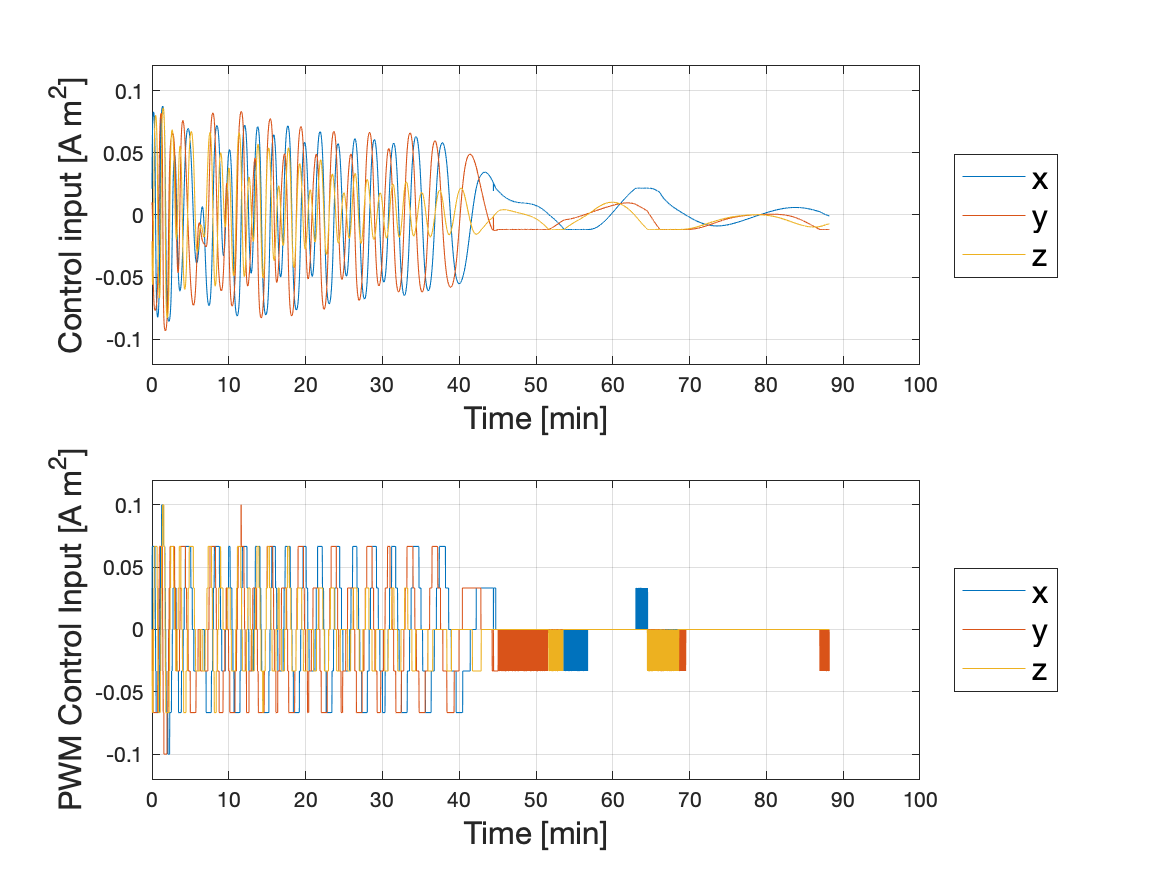
Pulse Width Modulation Method Applied to Nonlinear Model Predictive Control on an Under-actuated Small Satellite
Among various satellite actuators, magnetic torquers have been widely equipped for stabilization and attitude control of small satellites. Although magnetorquers are generally used with other actuators, such as momentum wheels, this paper explores a control method where only a magnetic actuation is available. We applied a nonlinear optimal control method, Nonlinear Model Predictive Control (NMPC),…
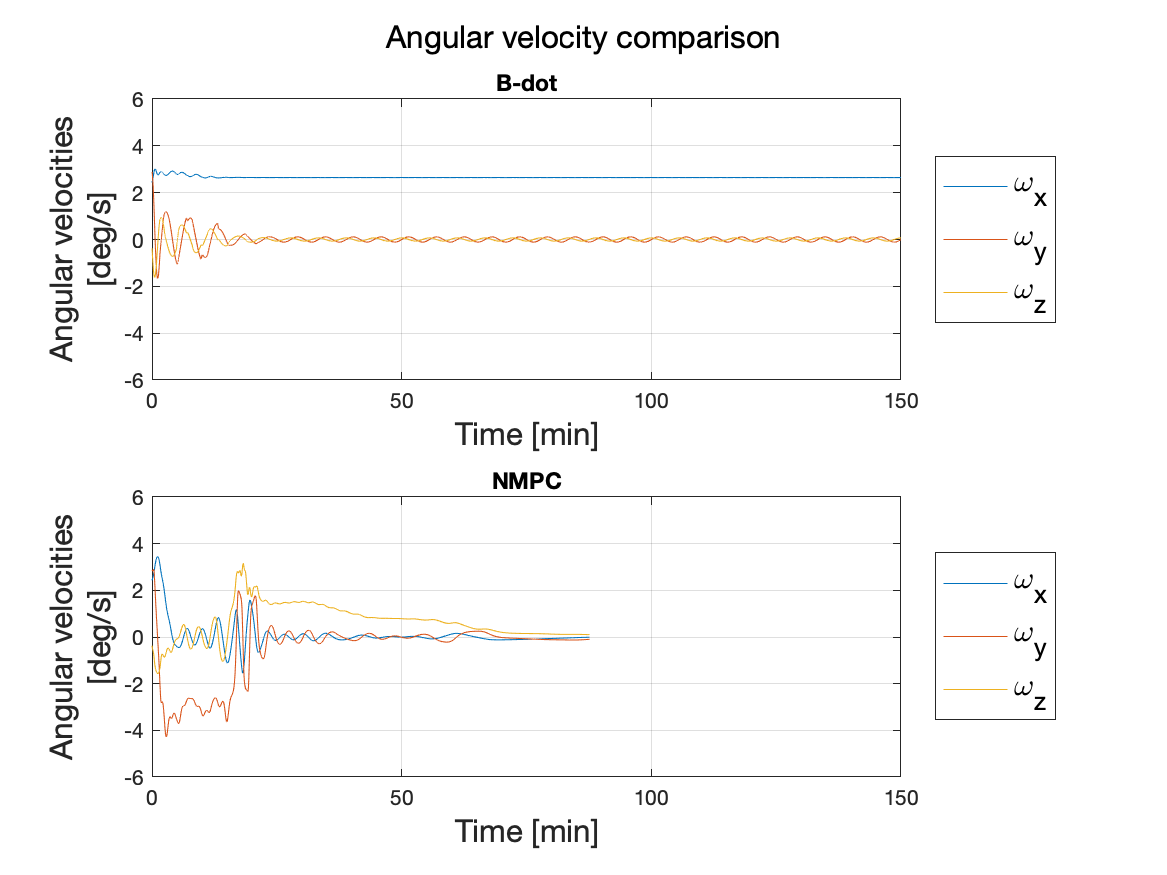
Nonlinear Model Predictive Detumbling of Small Satellites with a Single-Axis Magnetorquer
Abstract: Angular velocity detumbling is one of the very first mission objectives after a small satellite is released from a launch vehicle. Due to stringent constraints on their volume and weight, small spacecraft typically rely on magnetic actuators for attitude control and at times can afford only a single-axis magnetic torquer. This paper proposes an…