
Kota Kondo
I am a graduate student at MIT AeroAstro, working in the Aerospace Controls Lab (ACL) under the guidance of Professor Jonathan How. My research interests focus on multiagent systems, optimization, and learning-based trajectory planning.
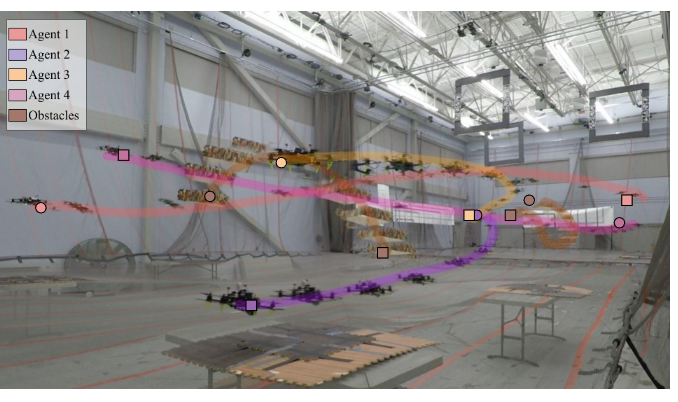
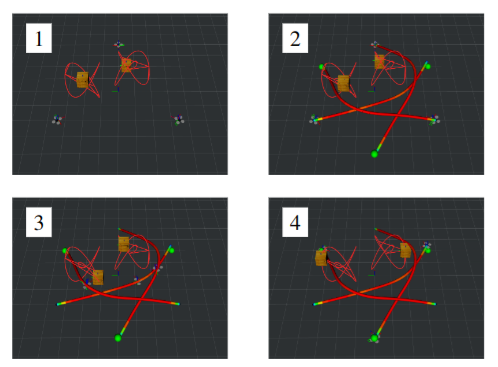
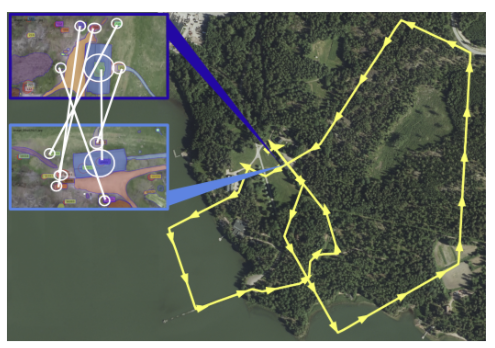
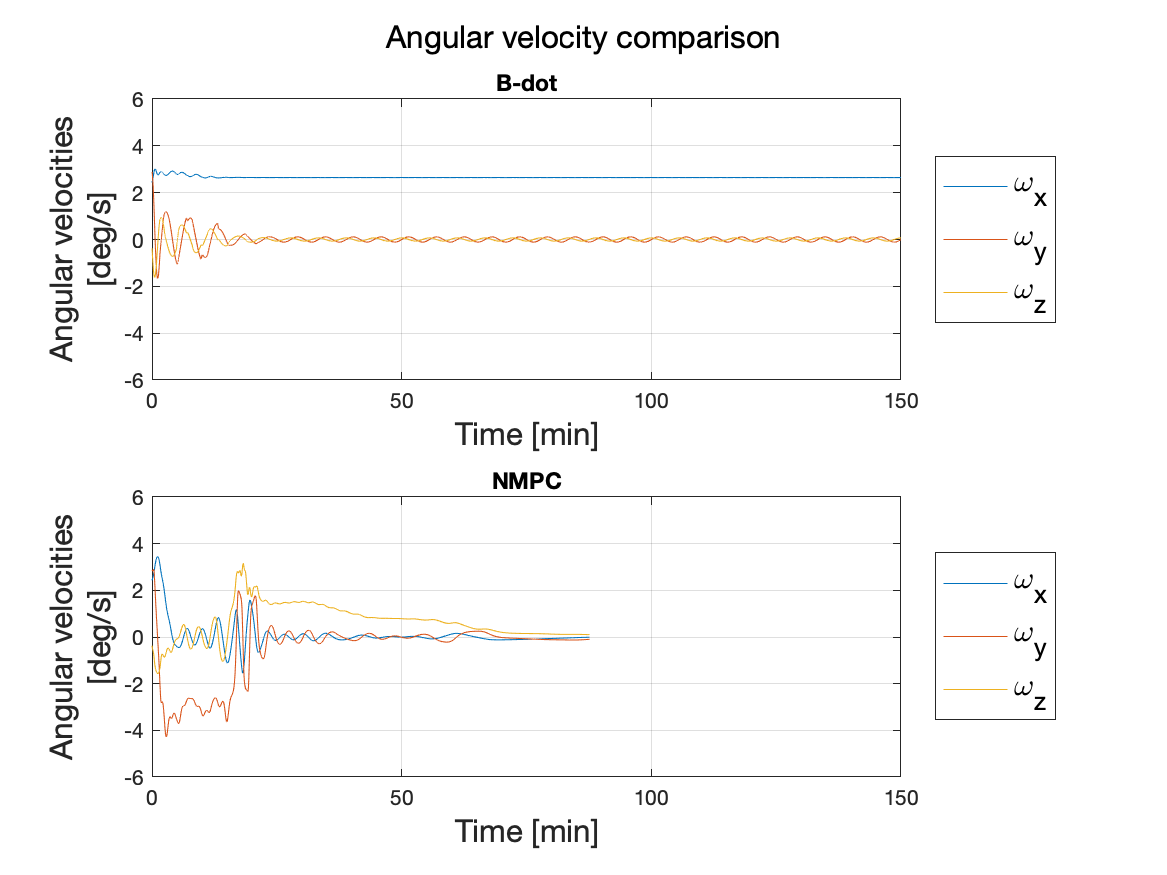
My current research projects include the development of a learning-based multiagent trajectory planner utilizing diffusion models, optimization-based trajectory planning, perception-aware and uncertainty-aware trajectory planning, detumbling an under-actuated spacecraft with a single-axis magnetic actuator, and quadcopter path-planning with an onboard EMPC controller.
Latest News


Research Projects

Awards
Scholarships
- MathWorks Fellowship
- Funded full tuition, living stipend, and insurance costs
- Recruit Fellowship
- Funded three full years of tuition, living stipend, insurance costs, and travel for graduate studies
- Funai Overseas Scholarship
- Funded two full years of tuition, living stipend, insurance costs, and travel for graduate studies
- The James H.M. Sprayregen Scholarship
- supported to attend Aerospace conferences in Florida, Japan, and Australia
- U.S. - Japan Council TOMODACHI Sumitomo Corporation Scholarship
- Endowed $18,000 based on academic achievement to study at University of Michigan
- International Society of Transport Aircraft Trading Foundation Scholarship
- Funded a one-year tuition senior year for academic excellence in aeronautics and aerospace engineering
Prizes
Yamakawa Prize (President’s Award), Kyushu University
Awarded excellent academic record and acts for humanity, sociability, and internationally
- Dean’s Award (Top 2% freshman GPA), Kyushu University
Publications
Journal Paper
- Kondo, K., Figueroa, R., Rached, J., Tordesillas, J., Lusk, P., How, J., Robust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments, IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2023.3342561
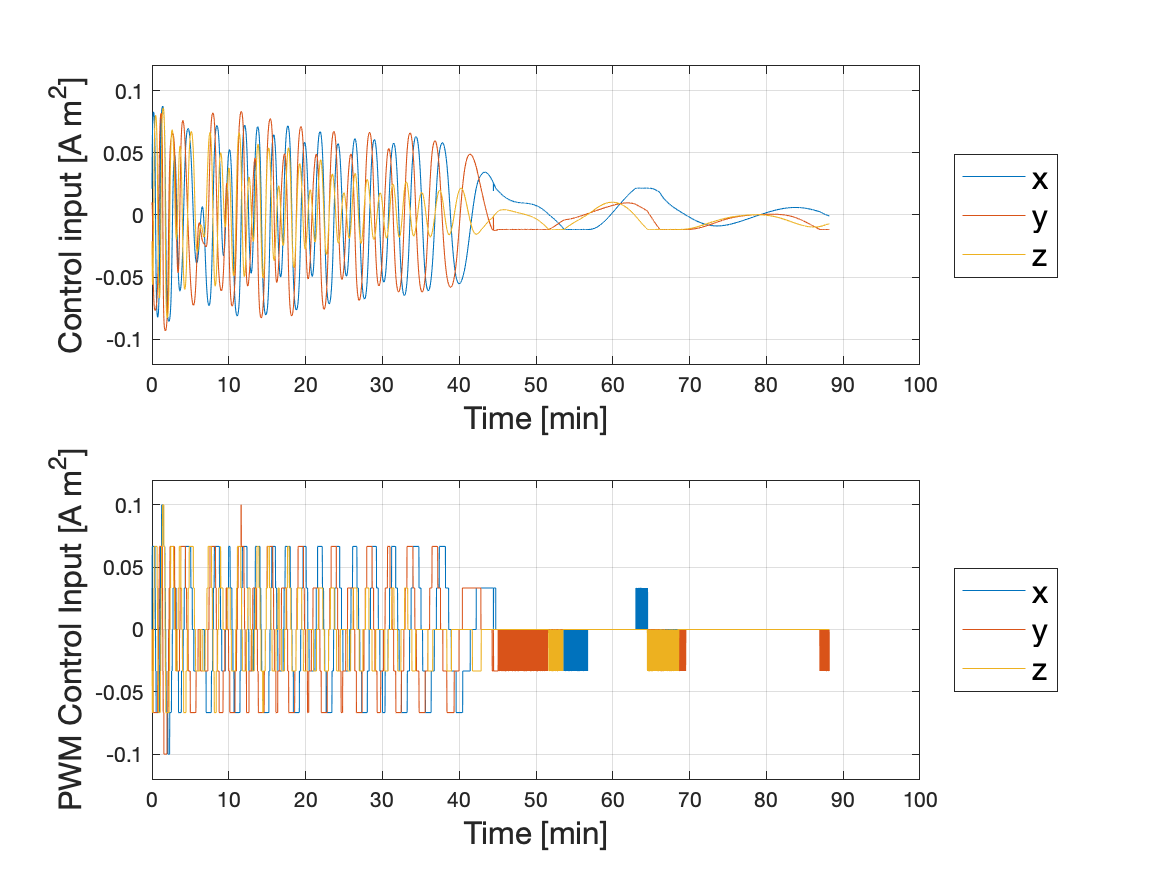
Kondo, K., Kolmanovsky, I., Yoshimura, Y., Bando, M., Nagasaki, S., Hanada, T., “Nonlinear Model Predictive Detumbling of Small Satellites with a Single-axis Magnetic Actuator,” JGCD, Vol. 44, No. 6 (2021), pp. 1211-1218 doi: doi/abs/10.2514/1.G005877
Conference Paper
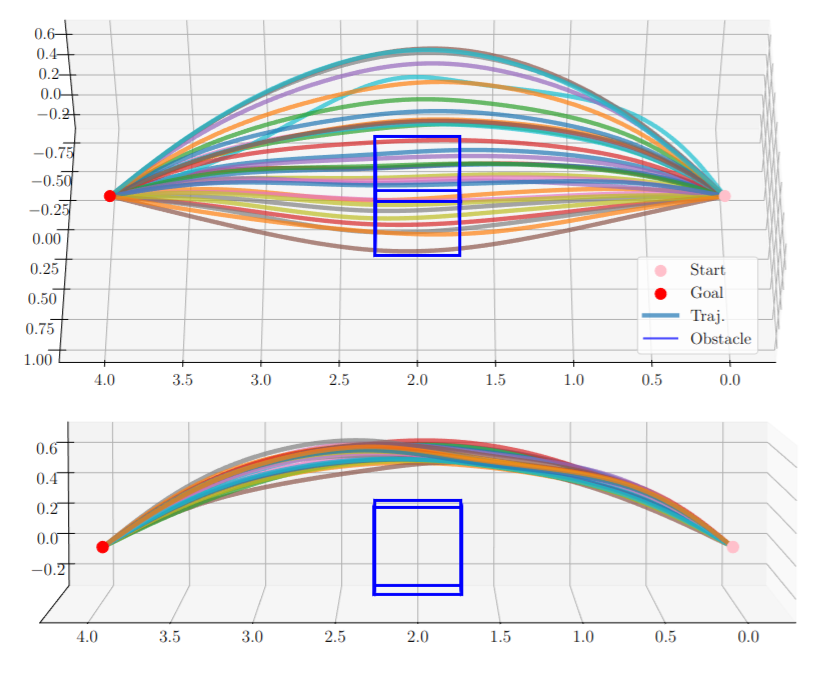
- Kondo K., Tagliabue A.∗, Cai X.∗, Tewari C., Garcia O., Espitia-Alvarez M., How J.∗, ”CGD: Constraint Guided Diffusion Policies for UAV Trajectory Planning,” submitted to 2024 IEEE CDC. ∗equal contributions.
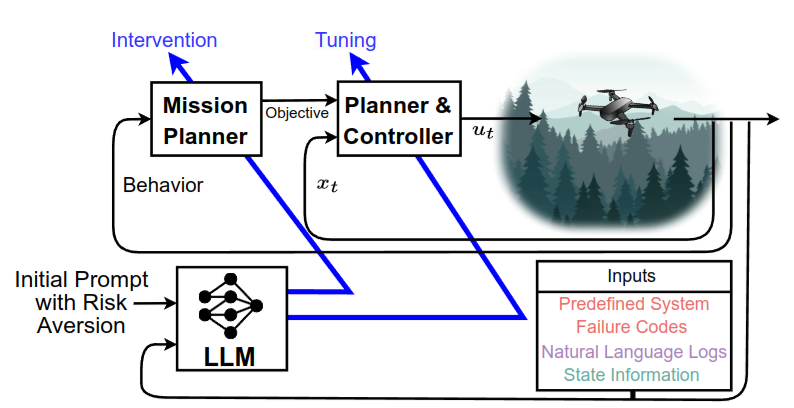
- Tagliabue A.∗, Kondo K.∗, Zhao T.∗, Peterson M.∗, Tewari C.∗, How J.∗, ”REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial Robots,” accepted to 2024 IEEE CDC. ∗equal contributions.
- Kinnari, J.∗, Thomas, A.∗, Lusk, P., Kondo, K., How, J., SOS-MATCH: Segmentation for Open-Set SLAM in Unstructured Environments, accepted to 2024 IEEE IROS
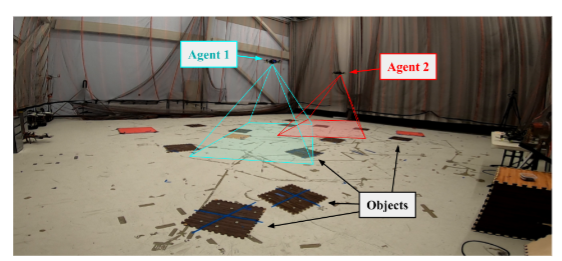
- Kondo K., Tewari C., Peterson M., Thomas A., Kinnari J., Tagliabue A., How J.∗, ”PUMA: Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment,” accepted to 2024 IEEE ICRA.
- Kondo, K., Tordesillas J., Figueroa R., Rached J., Merkel J., Lusk P., How J., Robust MADER: Decentralized and Asynchronous Multiagent Trajectory Planner Robust to Communication Delay, 2023 IEEE ICRA, London, UK, 2023.
- Kondo, K., Yoshimura, Y., Nagasaki, S., Hanada, T., “Pulse Width Modulation Method Applied to Nonlinear Model Predictive Control on an Under-actuated Small Satellite,” 2021 AIAA SciTech Forum, Nashville, US, 2021.
- Kondo, K., Yoshimura, Y., Bando M., Nagasaki, S., Hanada, T., “Model Predictive Approach for Detumbling an Underactuated Satellite” 2020 AIAA SciTech Forum, Florida, US, 2020.
- Kondo, K., Yoshimura, Y., Bando M., Nagasaki, S., Hanada, T.,“Detumbling with Model Predictive Control for an Underactuated Small Satellite,” AIAA Region VII – Australia/International Student Conference, Australia, 2019.
Conference Poster
- Kondo, K., Tewari C., Tagliabue A., Tordesillas J., Lusk P., How J., ”PRIMER: Perception-Aware Robust
Learning-based Multiagent Trajectory Planner,” 2023 IEEE ICRA, UK, 2023. - Kondo, K., Figueroa, R., Rached, J., Tordesillas, J., Lusk, P., How, J., Robust MADER: Decentralized
Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments, Won Best Poster Award at ICRA 2023 CAMRS Workshop. - Kondo, K., Yoshimura, Y., Bando M., Nagasaki, S., Hanada, T., “Detumbling of Small Satellites with a Single-Axis Magnetorquer” Proceedings of 63th Space Sciences and Technology Conference, Tokushima, Japan, 2019.