Portfolio
Master’s Thesis: Decentralized Multiagent Trajectory Planning in Real-World Environments
Research
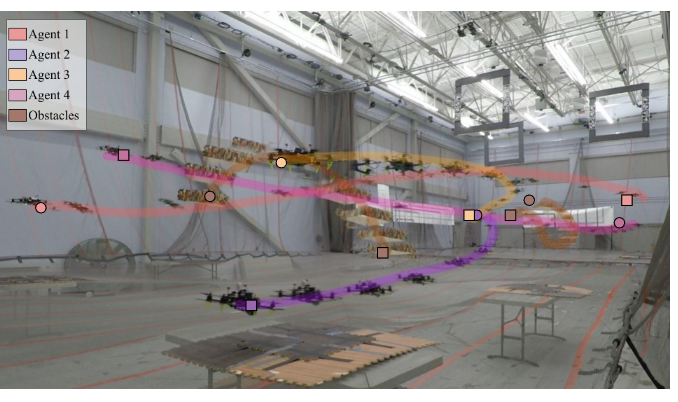
PRIMER: Perception-Aware Robust Learning-based Multiagent Trajectory Planner
Research
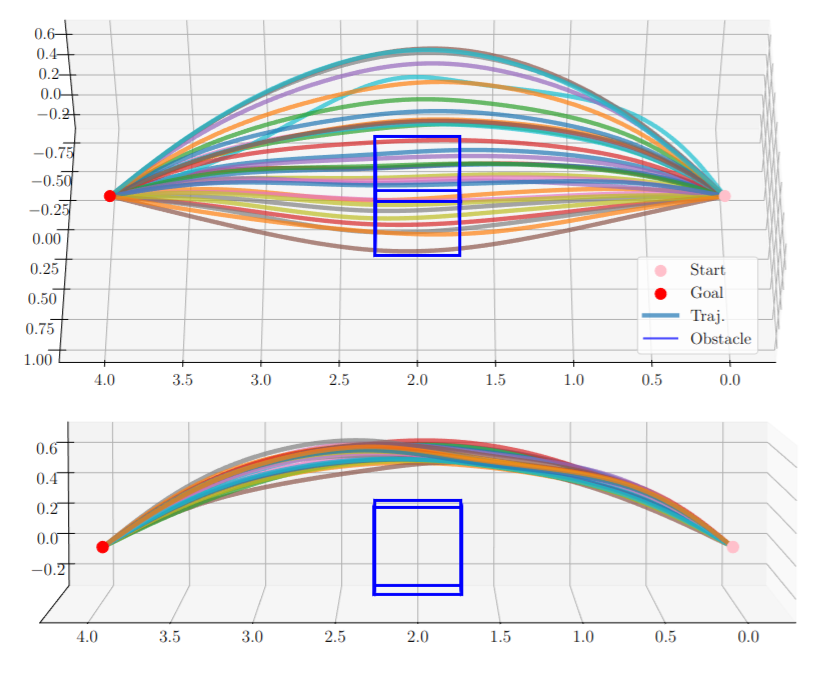
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory Planning
Research
PUMA: Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment
Research
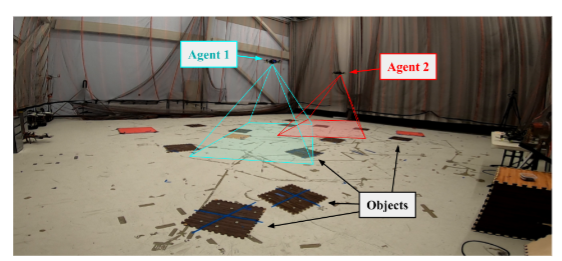
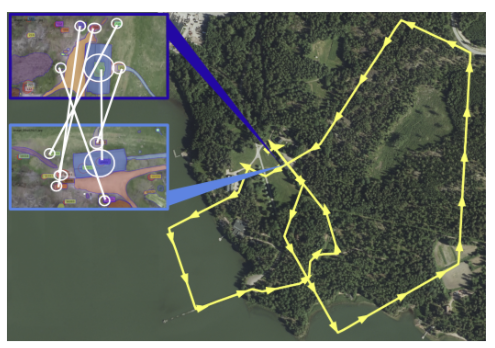
SOS-Match: Segmentation for Open-Set Robust Correspondence Search and Robot Localization in Unstructured Environments
Research
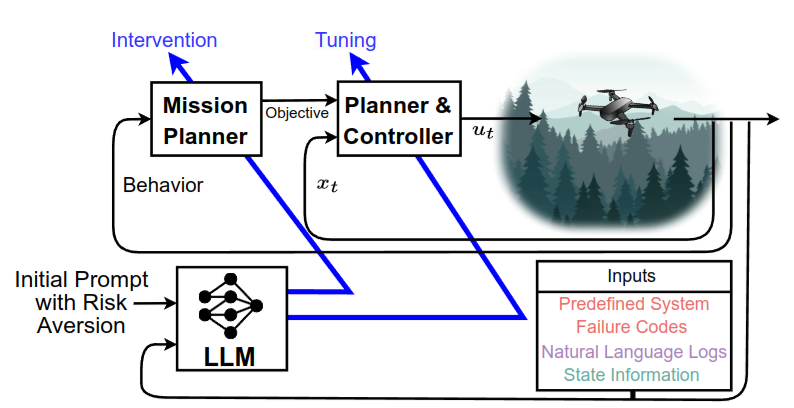
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial Robots
Research
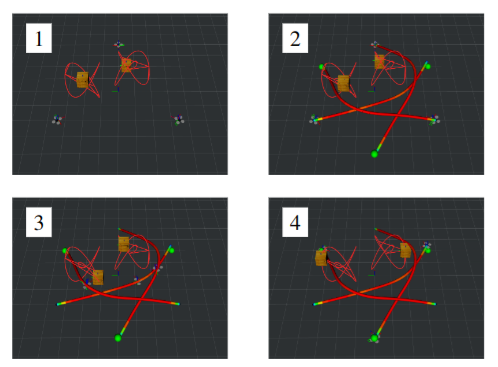
Robust mader: Decentralized multiagent trajectory planner robust to communication delay in dynamic environments
Research, YouTube Videos
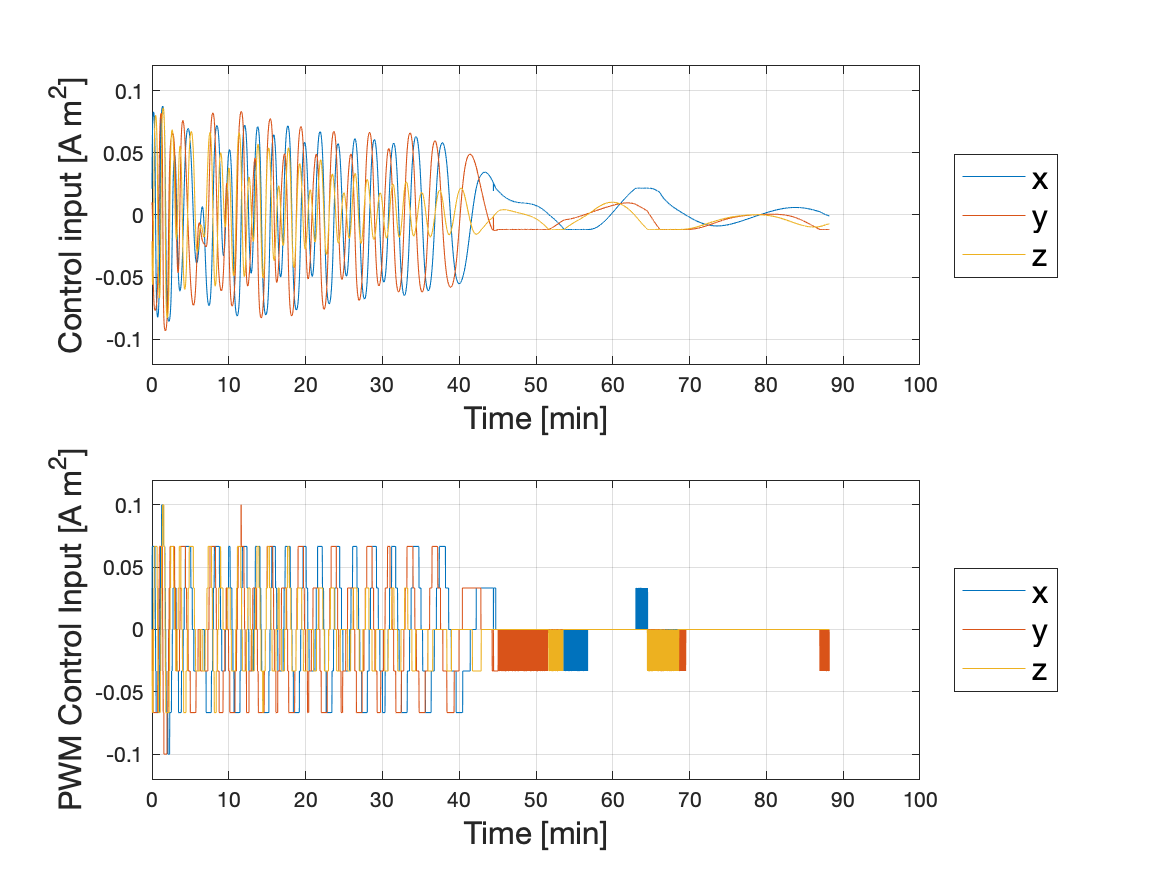
Pulse Width Modulation Method Applied to Nonlinear Model Predictive Control on an Under-actuated Small Satellite
Research
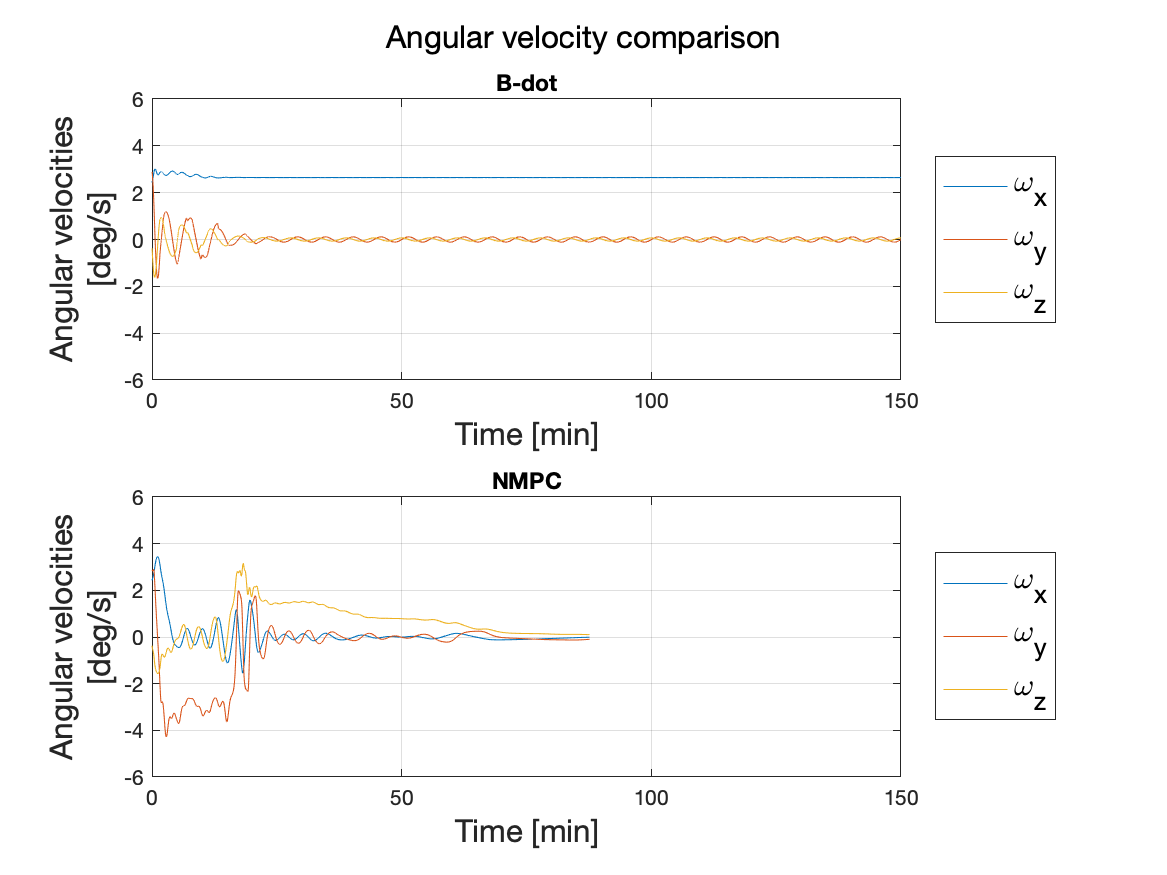
Nonlinear Model Predictive Detumbling of Small Satellites with a Single-Axis Magnetorquer
Research